Wir präsentieren
Unser allererstes Bot-Modul heisst "Ruprecht Zimmerraupe".
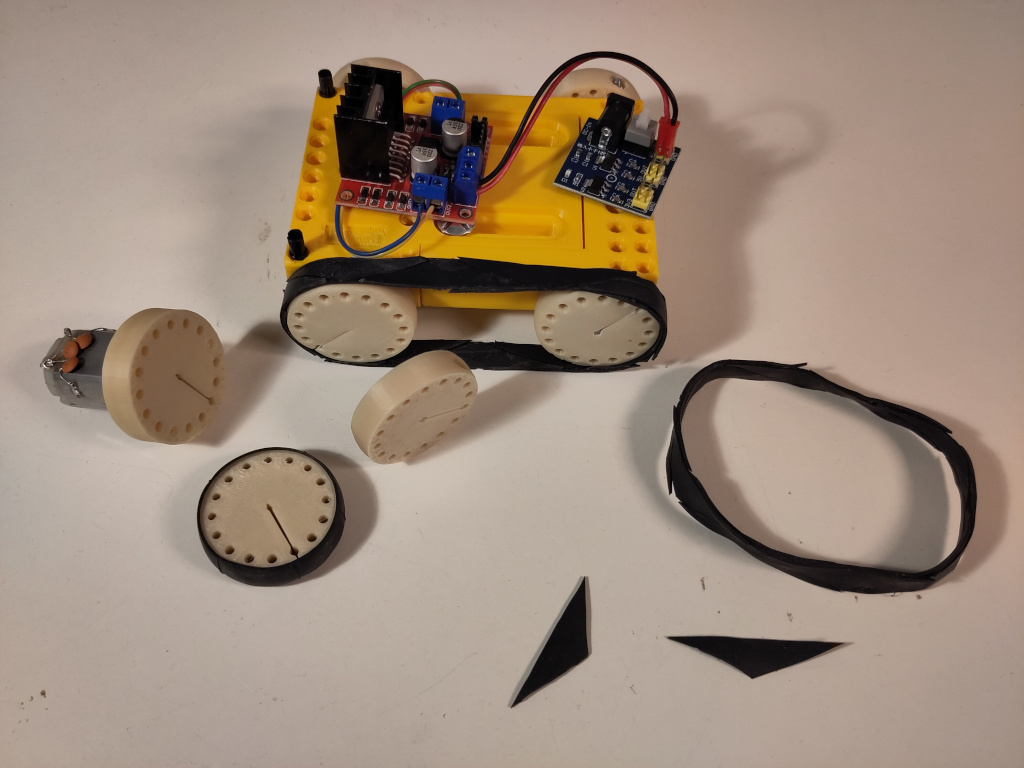
Ruprecht benutzt zur Fortbewegung einen Raupenantrieb. Er ist als einfaches Einstiegsmodul konzipiert, was günstig nachgebaut werden kann.
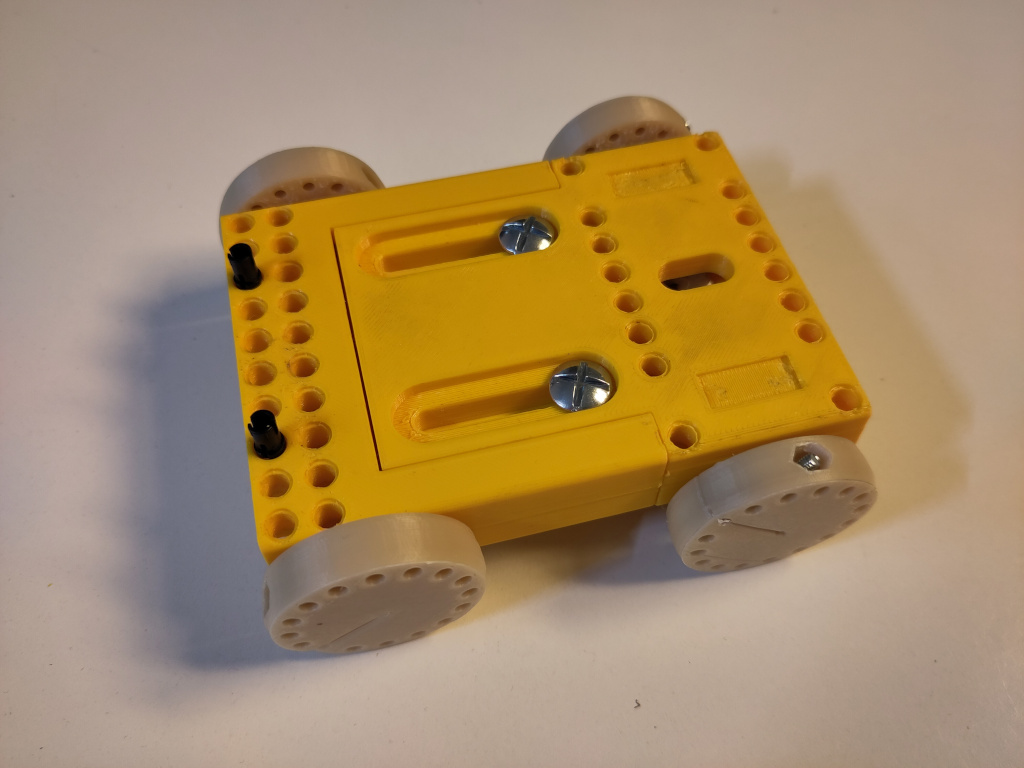
Der Trägerblock
Ein simpler Trägerblock1 aus zwei verbundnen und verschiebbaren 3D-gedruckten Platten dient als Verbindungstück zwichen den elektronischen Komponenten den Motoren und kann weitere Module transportieren.
Die Elektromotoren
Ruprecht hat zwei Elektromotoren2 mit direkt verbundnen Rädern und zwei passive Räder an eigenen Achsen.
Die Räder
Die Räder3 sind pro Seite über eine aus alten Fahrradschläuchen gebastelten Raupe verbunden.
Der Controller
Die Steuerung des Raupenfahrzeugs übernimmt ein ESP324 von Espressiv5, der Einfachheit halber wird hier ein Developmen-Kit verwendet. Diese Plattform ist sehr praktisch, da sie für wenig Geld alles liefert, was wir brauchen. Für die Programmierung kann neben dem IDE des Herstellers6 auch einfach das Arduino-IDE7 verwendet werden.
Der ESP32 hat einen relativ geringen Stromverbrauch und kommt mit Bluetooth8 und WiFi9 On-Board. Wir haben zwei Kerne um etwa getrennt die Distanzmessung und die Motorsteuerung zu machen.
H-Brücke
Die Motorsteuerung wird mittels einer L298N H-Brücke8 gelöst. Die Stromversorgung wird aktuell noch direkt gesteckt, soll aber in ein "Bauchmodul" ausgelagert werden.
Distanzmessung
Um Unfälle, wie Kollisionen und Abstürze, zu vermeiden, wird die Distanz zu Gegenständen im Raum und zum Boden gemessen. Dazu wird ein Ultraschallsignal in den Raum gesendet und die Zeit gemessen, die das Signal braucht um zum Ausgangspunkt zurückzukehren. Hier kommt aktuell ein HC-SR046 zum Einsatz. Mit einem DHT227 wird die Lufttemperatur gemessen um den Koeffizienten zu berechnen, der die Schallgeschwindigkeit korrigiert (...).
-
Gitlab:Modulbot/Chassis (Stand 2023-06-18) ↩↩
-
Elektromotor - (DC 12 - 24V) die genauen Maße sind Fussnote1 zu entnehmen (leider keine Standards) ↩
-
Gitlab:Modulbot/Wheels (Stand 2023-06-18) / Thingiverse:Modulbot/Wheels (Stand 2023-06-18) ↩
-
Wikipedia:ESP32 (Stand 2023-06-18) / RandomNerdTutorials:ESP32 (Stand 2023-06-18) ↩
-
Wikipedia:H-bridge (Stand 2023-06-18) ↩
-
RandomNerdTutorials:HC-SR04 (Stand 2023-06-18) ↩↩
-
RandomNerdTutorials:DHT22 (Stand 2023-06-18) ↩↩
-
Wikipedia:Bluetooth (Stand 2023-06-18) ↩↩
-
Wikipedia:WiFi (Stand 2023-06-18) ↩
- 2023-06-18 - mic